It is easy to calculate around 90 % of applications knowing only the following five parameters:
- Abzubremsende Masse (Gewicht) m [kg]
- Aufprall- oder Auffahrgeschwindigkeit vD [m/s]
- Evtl. vorhandene zusätzliche Antriebskraft F [N]
- Anzahl der Hübe oder Takte pro Stunde x [1/h]
- Anzahl Stoßdämpfer parallel n
Key to symbols used
| Symbol | Unit | Description | Symbol | Unit | Description |
|---|---|---|---|---|---|
| W1 | Nm | Kinetic energy per cycle | 3ST | 1 to 3 | tall torque factor (normally 2.5) |
| W2 | Nm | Propelling force energy per cycle | M | Nm | Propelling torque |
| W3 | Nm | Total energy per cycle (W1 + W2) | I | kgm2 | Moment of Inertia |
| 1W4 | Nm/hr | Total energy per hour (W3 · c) | g | m/s2 | Acceleration due to gravity = 9.81 |
| me | kg | Effective weight | h | m | Drop height excl. shock absorber stroke |
| m | kg | Mass to be decelerated | s | m | Shock absorber stroke |
| n | Number of shock absorbers (in parallel) | L/R/r | m | Radius | |
| 2v | m/s | Velocity at impact | Q | N | Reaction force |
| 2vD | m/s | Impact velocity at shock absorber | μ | Coefficient of friction | |
| ω | rad/s | Angular velocity at impact | t | s | Deceleration time |
| F | N | Propelling force | a | m/s2 | Deceleration |
| c | 1/hr | Cycles per hour | α | ° | Side load angle |
| P | kW | Motor power | β | ° | Angle of incline |
1 All mentioned values of W4 in the capacity charts are only valid for room temperature. There are reduced values at higher temperature ranges.
2 v or vD is the final impact velocity of the mass. With accelerating motion the final impact velocity can be 1.5 to 2 times higher than the average. Please take this into account when calculating kinetic energy.
3 ST =^ relation between starting torque and running torque of the motor (depending on the design)
In all the following examples the choice of shock absorbers made from the capacity chart is based upon the values of (W3), (W4), (me) and the desired shock absorber stroke (s).
Note:
When using several shock absorbers in parallel, the values (W3), (W4) and (me) are divided according to the number of units used.
|
Reaction force Q [N] Q = (1,5 · W3) / s |
Stopping time t [s] t = (2,6 · s) / vD |
Deceleration a [m/s2] a = (0,75 · vD2) / s |
Approximate values assuming correct adjustment. Add safety margin if necessary. (Exact values will depend upon actual application data and can be provided on request.)
Applications
| Application | Formulae | Example | |
|---|---|---|---|
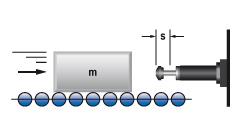
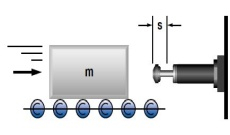
1. Mass without propelling force
|
W1 = m · v2 · 0,5
W2 = 0
W3 = W1 + W2
W4 = W3 · x
vD = v
me = m
|
m = 100 kg W1 = 100 · 1,52 · 0,5 = 113 Nm |
|
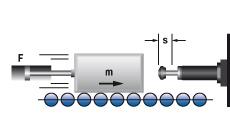
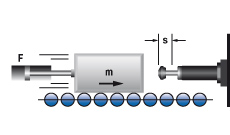
2. Mass with propelling force
|
W1 = m · v2 · 0,5
W2 = F · s
W3 = W1 + W2
W4 = W3 · x
vD = v
me = (2 · W3) / vD2
2.1 bei senkrechter Bewegung nach oben
W2 = (F – m · g) · s
2.2 bei senkrechter Bewegung nach unten
W2 = (F + m · g) · s
|
m = 36 kg
1v = 1,5 m/s
F = 400 N
x = 1000 1/h
s = 0,025 m (gewählt)
W1 = 36 · 1,52 · 0,5 = 41 Nm
W2 = 400 · 0,025 = 10 Nm
W3 = 41 + 10 = 51 Nm
W4 = 51 · 1000 = 51000 Nm/h
me = 2 · 51 : 1,52 = 45 kg
1 v is the fi nal impact velocity of the mass:
With pneumaticallypropelled systems this can be 1.5 to 2 times the average velocity. Please take this into account when calculating energy. |
|
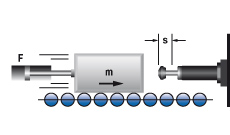
3. Mass with motor drive
|
W1 = m · v2 · 0,5
W2 = (1000 · P ·HM · s) / v
W3 = W1 + W2
W4 = W3 · x
vD = v
me = (2 · W3) / vD2
|
m = 800 kg W1 = 800 · 1,22 · 0,5 = 576 Nm motor, coupling and gearbox into calculation for W1 |
|
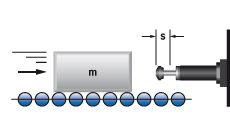
4. Mass on driven rollers
|
W1 = m · v2 · 0,5
W2 = m · μ · g · s
W3 = W1 + W2
W4 = W3 · x
vD = v
me = (2 · W3) / vD2
|
m = 250 kg W1 = 250 · 1,52 · 0,5 = 281 Nm |
|
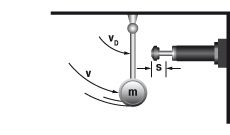
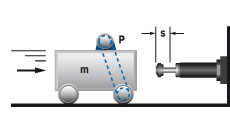
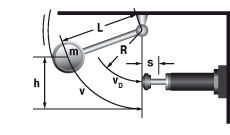
5. Swinging mass with propelling force
|
W1 = m · v2 · 0,5 = 0,5 · J · ω2
W2 = (M · s) / R
W3 = W1 + W2
W4 = W3 · x
vD = (v · R) / L = ω · R
me = (2 · W3) / vD2
|
m = 20 kg W1 = 20 · 12 · 0,5 = 10 Nm |
|
6. Free falling mass
|
W1 = m · g · h
W2 = m · g · s
W3 = W1 + W2
W4 = W3 · x
vD = √2 · g · h
me = (2 · W3) / vD2
|
m = 30 kg W1 = 30 · 0,5 · 9,81 = 147 Nm |
|
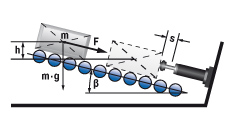
6.1 Mass rolling/sliding down incline
|
W1 = m · g · h = m · vD2 · 0,5
W2 = m · g · sinβ · s
W3 = W1 + W2
W4 = W3 · x
vD = √2 · g · h
me = (2 · W3) / vD2
6.1a bei senkrechter Bewegung nach oben
W2 = (F – m · g· sinβ) · s
6.1b bei senkrechter Bewegung nach unten
W2 = (F + m · g· sinβ) · s
|
m = 500 kg W1 = 500 · 9,81 · 0,1 = 490,5 Nm |
|
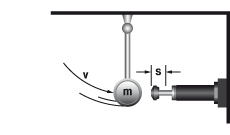
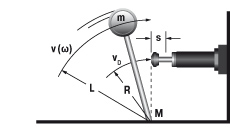
6.2 Mass free falling about a pivot point
|
W1 = m · g · h
W2 = 0
W3 = W1 + W2
W4 = W3 · x
vD = √2 · g · h · (R / L)
me = (2 · W3) / vD2
tan α = s / R
|
m = 50 kg W1 = 50 · 9,81 · 1 = 490,5 Nm |
|
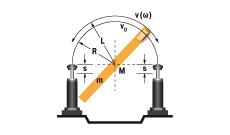
7. Rotary index table with propelling torque
|
W1 = m · v2 · 0,25 = 0,5 · J · ω2
W2 = (M · s) / R
W3 = W1 + W2
W4 = W3 · x
vD = (v · R) / L = ω · R
me = (2 · W3) / vD2
|
m = 1000 kg W1 = 1000 · 1,12 · 0,25 = 303 Nm |
|
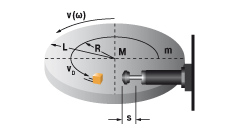
8. Swinging arm with propelling torque (uniform weight distribution)
|
W1 = m · v2 · 0,17 = 0,5 · J · ω2
W2 = (M · s) / R
W3 = W1 + W2
W4 = W3 · x
vD = (v · R) / L = ω · R
me = (2 · W3) / vD2
|
J = 56 kgm2 W1 = 0,5 · 56 · 12 = 28 Nm |
|
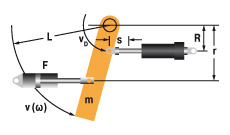
9. Swinging arm with propelling force (uniform weight distribution)
|
W1 = m · v2 · 0,17 = 0,5 · J · ω2
W2 = (F · r · s) / R = (M · s) / R
W3 = W1 + W2
W4 = W3 · x
vD = (v · R) / L = ω · R
me = (2 · W3) / vD2
|
m = 1000 kg W1 = 1000 · 22 · 0,17 = 680 Nm |
|
10. Mass lowered at controlled speed
|
W1 =m · v2 · 0,5
W2 = m · g · s
W3 = W1 + W2
W4 = W3 · x
vD = v
me = (2 · W3) / vD2
|
m = 6000 kg W1 = 6000 · 1,52 · 0,5 = 6750 Nm |
|

Effective Weight (me)
The effective weight (me) can either be the same as the actual weight (examples Aand C), or it can be an imaginary weight representing a combination of the propelling force or lever action plus the actual weight (examples B and D).
| Einsatzfall | Beispiel |
|---|---|
A Mass without propelling force
|
m = 100 kg
vD = v = 2 m/s
W1 = W3 = 200 Nm
me = (2 · 200) / 4 = 100 kg
FORMULA: ME = M
|
B Mass with propelling force
|
m = 100 kg
F = 2000 N
vD = v = 2 m/s
s = 0,1 m
W1 = 200 Nm
W2 = 200 Nm
W3 = 400 Nm
me = (2 · 400) / 4 = 200 kg
FORMEL: ME = (2 · W3) / VD2
|
C Mass without propelling force direct against shock absorber
|
m = 20 kg
vD = v = 2 m/s
W1 = W3 = 40 Nm
me = (2 · 40) / 22 = 20 kg
FORMEL: ME = M
|
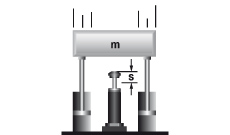
D Mass without propelling force with mechanical advantage
|
m = 20 kg
v = 2 m/s
vD = 0,5 m/s
s = 0,1 m
W1 = W3 = 40 Nm
me = (2 · 40) / 0,52 = 320 kg
FORMEL: ME = (2 · W3) / VD2
|